



įŁė═ā”╣▐Ė▀╠Äū„śI(y©©)ÖCąĄ╩ųĄ─įOėŗ
üĒį┤Ż║ĪČ╣▄Ą└▒ŻūoĪĘļsųŠ ū„š▀Ż║Åł╚AÅŖ ĢrķgŻ║2020-2-4 ķåūxŻ║
╬„▓┐╣▄Ą└╣½╦ŠĖ╩├C▌öė═ÜŌĘų╣½╦Š
š¬ ꬯║┤¾ą═įŁė═ā”╣▐┤µį┌Ė▀╠Äū„śI(y©©)’LļUĪŻ╣żśI(y©©)ÖCąĄ╩ųęįŲõņ`╗Ņąį┐╔ęį╠µ┤·╚╦╣ż▓┘ū„Ż¼ĮĄĄ═ū„śI(y©©)’LļUĪŻįOėŗ┴╦ę╗ĘN╣żśI(y©©)ÖCąĄ╩ųŻ¼īóÖCąĄįOėŗĪó┐žųŲŽĄĮy(t©»ng)░┤ę╗Č©ęÄ(gu©®)ätš¹║Ž×ķę╗¾wĪŻÖCąĄ╩ųąį─▄ā×(y©Łu)┴╝Ż¼┐╔ęį┤·╠µ╚╦╣żū„śI(y©©)ĪŻ
ĻPµIį~Ż║ā”╣▐Ż╗Ę└Ė»Ż╗ū„śI(y©©)’LļUŻ╗╣żśI(y©©)ÖCąĄ╩ų
ÖCŲ„╚╦ÖCąĄ╩ųČÓė├ė┌’LļUę“╦žć└ųžūĶĄKš²│Ż╩®╣żū„śI(y©©)╗“Š╚į«ķ_š╣Ą─ł÷║ŽĪŻ┤¾ą═įŁė═ā”╣▐═Ō▒┌░l(f©Ī)╔·Ė»╬gĢrćŖ═┐Ę└Ė»ŲßĘ└Ė»Ż¼ćŖ═┐╩®╣żČÓ▓╔ė├┤Ņ─_╩ų╝▄╚╦╣żćŖ═┐Ż¼┤µį┌Ė▀╠Äū„śI(y©©)’LļUĪŻ▒Š╬─ō■(j©┤)┤╦įOėŗę╗ĘNĖ▀╠Äū„śI(y©©)ÖCąĄ╩ųŻ¼╠µ┤·╚╦╣żū„śI(y©©)Ż¼ĮĄĄ═ū„śI(y©©)’LļUĪŻ
1 ÖCąĄĮYśŗ
1.1 ÖCąĄĻP╣Ø(ji©”)
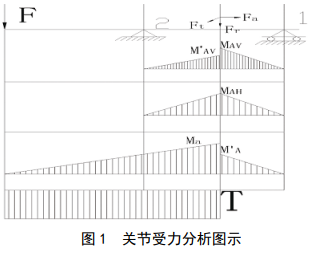
ÖCąĄ╩ų▓╔ė├▒█ĮYśŗīŹ¼F(xi©żn)┐šķg▀\ąąŻ¼▒█śŗ╝■ų„ę¬ĮM│╔▓┐Ęų╩ŪÖCąĄ╩ųĻP╣Ø(ji©”)Ż¼ū„ė├╩Ūų¦│ųÖCąĄ╩ųŻ¼▓ó┤┘▀MŲõ─┐ś╦Ą─▀\äėŻ¼īŹ¼F(xi©żn)į┌─┐ś╦╗Ņäėģ^(q©▒)ė“ĘČć·ā╚ęŲäėĖ─ūāÖCąĄ╩ųĄ─╬╗ų├Ż©ĘĮ╬╗ĮŪŻ®ĪŻÖCąĄ╩ųĻP╣Ø(ji©”)▀xō±ą╬ĀŅęÄ(gu©®)ätĄ─õōĮYśŗŻ¼ĻP╣Ø(ji©”)Ą─╩▄┴”Ęų╬÷╚ńłD1╦∙╩ŠĪŻ
ŲõÅØŪ·Įž├µŽĄöĄ(sh©┤)×ķŻ║

ÅØŪ·æ¬┴”×ķŻ║
┼żŪąæ¬┴”×ķŻ║

░┤ÅØ┼ż║Ž│╔ÅŖČ╚▀MąąąŻ║╦ėŗ╦ŃŻ¼ī”ė┌å╬Ž“▐DäėĄ─▐D▌SŻ¼▐DŠž░┤├}äė裣h(hu©ón)╠Ä└ĒŻ¼╣╩╚Īš█║ŽŽĄöĄ(sh©┤) a =0.6Ż¼ät«ö┴┐æ¬┴”×ķŻ║
ė╔GB/T 699©D 1999ĪČ ā×(y©Łu)┘|╠╝╦žĮYśŗõōĪĘś╦£╩ęÄ(gu©®)Č©45#õō┐╣└ŁÅŖČ╚×ķ600 MPaĪóįSė├ÅØŪ·æ¬┴”60 MPaŻ¼┤╦╠Ä▀xō±45#õōū„×ķĻP╣Ø(ji©”)ĪŻ
1.2 ÖCąĄįOėŗ
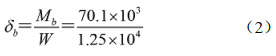
╣żśI(y©©)ÖCŲ„╚╦ūįė╔Č╚öĄ(sh©┤)┴┐Ęų×ķå╬ūįė╔Č╚╩ų═¾Īóā╔éĆūįė╔Č╚╩ų═¾Īó╚²éĆūįė╔Č╚╩ų═¾ĪŻĖ∙ō■(j©┤)▒Š┤╬īŹļH╩╣ė├ę¬Ū¾Ż¼įOėŗö[äė║═▐Däėā╔éĆūįė╔Č╚Ż¼ų¦ō╬║═Ė─ūāÖCąĄ╩ųū╦æB(t©żi)ĪŻÖCąĄ╩ųĮYśŗ╚ńłD 2╦∙╩ŠĪŻ
2 ┐žųŲŽĄĮy(t©»ng)
2.1 ┐žųŲąŠŲ¼▀xō±
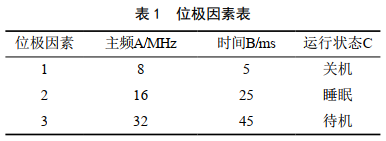
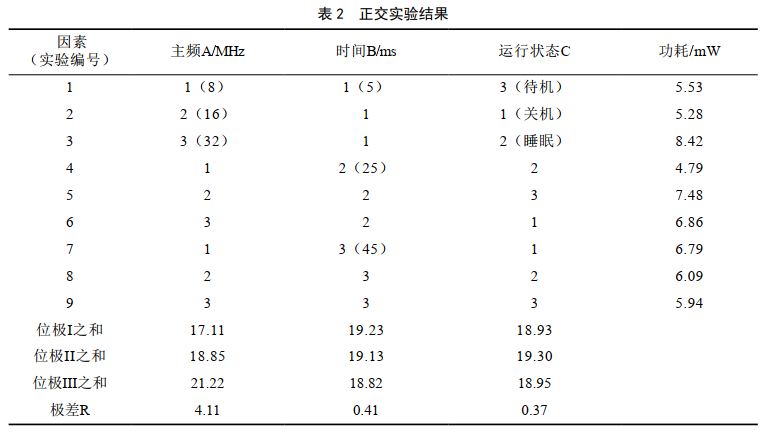
┐žųŲŽĄĮy(t©»ng)å╬Ų¼ÖC▓╔ė├š²Į╗īŹ“×┤_Č©Ż¼┐╝æ]CPUų„ŅlĪóĘ┤üļŖē║Öz£yĢrķgĪó¤oĖ╔ö_Ģr╣żū„ĘĮ╩ĮĄ╚╚²éĆ▀\ąąģóöĄ(sh©┤)Ż¼├┐éĆę“╦ž▀x3éĆ╬╗śOŻ¼╬╗śOę“╦ž╚ń▒Ē 1╦∙╩ŠĪŻ▀xė├L9Ż©34Ż®š²Į╗īŹ“ׯ¼ 9┤╬īŹ“×ĮY╣¹╚ń▒Ē 2╦∙╩ŠĪŻ
Ż©1Ż®ĮY╣¹Ęų╬÷
śO▓ŅRūŅ┤¾š▀Ż¼ī”ĮY╣¹ė░Ēæ│╠Č╚ūŅĖ▀Ż¼ RūŅąĪätė░Ēæ│╠Č╚ūŅĄ═Ż¼Ė„ę“╦žųžę¬│╠Č╚ę└┤╬×ķAĪ·BĪ·CĪŻ
Ż©2Ż®ų▒ė^Ęų╬÷
3╠¢īŹ“×ĮY╣¹Ą─╣”║─×ķ8.42 mW ,ĮY╣¹ūŅā×(y©Łu)Ż¼╦∙ęį▌^║├Ą─ĘĮ░Ė×ķA3B1C2ĪŻ
Ż©3Ż®╬╗śOėŗ╦Ń
╬╗śOī”æ¬īŹ“×ĮY╣¹įĮ┤¾Ż¼▒Ē├„ą¦╣¹įĮ║├Ż¼Å─╬╗śOų«║═┐╔ęį┐┤│÷Ż¼▌^║├Ą─ĘĮ░Ė╩ŪA3B1C2ĪŻ
Ż©4Ż®ŠC║ŽĘų╬÷
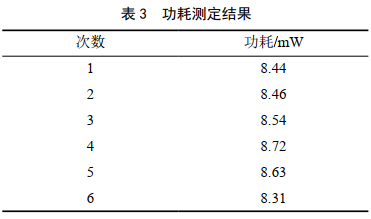
Ī░ų▒ė^Ęų╬÷Ī▒║═Ī░╬╗śOėŗ╦ŃĪ▒ĮY╣¹ę╗ų┬ĪŻė╔ė┌ļŖ┴„į÷┤¾ĢrļŖÖC░l(f©Ī)¤ß├„’@Ż¼ Cę“╦žėų╩ŪūŅ┤╬ę¬ę“╦žŻ¼ī”ĮY╣¹ė░ĒæąĪŻ¼ät▀xō±C1ĪŻūŅĮK┤_Č©š²Į╗īŹ“×ĮY╣¹×ķA3B1C1ĪŻō■(j©┤)┤╦£yČ©╣”║─╚ń▒Ē 3╦∙╩ŠĪŻ
═©▀^īŹ“×╝░Ęų╬÷Ż¼▀xō±ų„Ņl32 MHzĪóĢrķg5 msĄ─å╬Ų¼ÖCŻ¼┐╔ęįØMūŃę¬Ū¾ĪŻ
2.2 ┐žųŲŽĄĮy(t©»ng)ų„┐žļŖ┬Ę
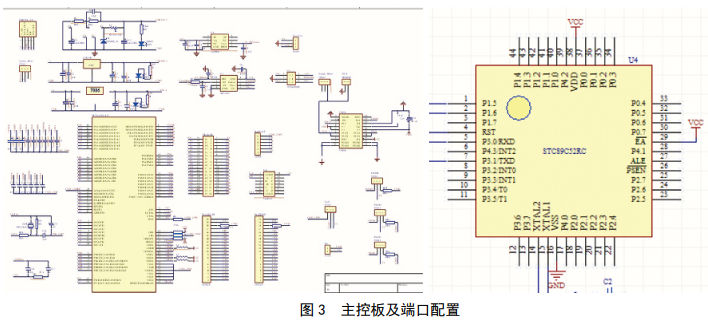
▓╔ė├PCB░Õ╝»│╔┐žųŲ─ŻēKŻ¼įOėŗ┐žųŲŽĄĮy(t©»ng)ų„┐žļŖ┬Ęå╬Ų¼ÖC┐žųŲČ╦┐┌ĪŻ═©ė├I/O ┐┌Ż©32 éĆŻ®Ż¼Å═╬╗║¾P1/P2/P3 ╩Ū£╩ļpŽ“┐┌/╚§╔Ž└ŁŻ╗ P0┐┌╩Ū┬®śOķ_┬Ę▌ö│÷Ż¼ū„×ķ┐éŠĆöUš╣ė├Ģr▓╗ė├╝ė╔Ž└ŁļŖūĶŻ╗ū„×ķ I/O ┐┌ė├ĢrŻ¼ąĶ╝ė╔Ž└ŁļŖūĶĪŻ ISPŻ©į┌ŽĄĮy(t©»ng)┐╔ŠÄ│╠Ż® /IAPŻ©į┌æ¬ė├┐╔ŠÄ│╠Ż®Ż¼┐╔═©▀^┤«┐┌Ż©RxD/P3.0Ż¼ TxD/P3.1Ż®ų▒ĮėŽ┬▌dė├æ¶│╠ą“Ż¼öĄ(sh©┤)├ļ╝┤┐╔═Ļ│╔ĪŻ 3 éĆ16 ╬╗Č©ĢrŲ„/ėŗöĄ(sh©┤)Ų„Ż¼╝┤Č©ĢrŲ„T0Īó T1Īó T2Ż¼Č╦┐┌┼õų├Ż©╦{╔½×ķ╩╣ė├Č╦┐┌Ż®Īóų„┐žļŖ┬Ę╝░å╬Ų¼ÖC┼õų├╚ńłD 3╦∙╩ŠĪŻ
2.3 ▄ø╝■┴„│╠
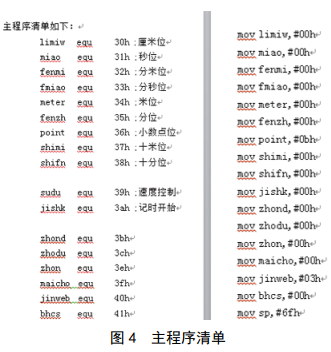
▄ø╝■│╠ą“░┤ššöĄ(sh©┤)ō■(j©┤)╠Ä└ĒĪó▀^│╠┐žųŲā╔éĆ╗∙▒ŠģóöĄ(sh©┤)įOėŗŻ¼ų„│╠ą“ŪÕå╬╚ńłD 4╦∙╩ŠĪŻ
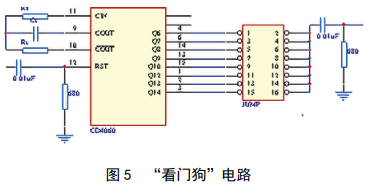
×ķĘ└ų╣▀\ąą Ī░╦└ÖCĪ▒Ż¼į÷╝ėĪ░┐┤ķT╣ĘĪ▒ļŖ┬ĘŻ¼╚ńłD 5╦∙╩ŠĪŻ
Ī░┐┤ķT╣ĘĪ▒ļŖ┬Ę╩Ū│╔╩ņ╝╝ągŻ¼ŲõCD4060╩ŪĦš±╩ÄŲ„Ą─14╬╗ėŗöĄ(sh©┤)Ų„Ż¼š±╩ÄŅl┬╩ f ė╔ RTĪó CTøQČ©ĪŻR Sė├ė┌Ė─╔Ųš±╩ÄŲ„Ą─ĘĆ(w©¦n)Č©ąįŻ¼ R Sę¬┤¾ė┌RTĪŻę╗░Ń╚ĪRS =10 RTŻ¼ŪęRT >1 k”ĖŻ¼ CT Ī▌100 pFĪŻ╚ń╣¹RS=450 ”ĖŻ¼ RT=45 ”ĖŻ¼ CT =1 uFŻ¼ät f =10 HzĪŻ 4060Ą─š±╩ÄŅl┬╩║═Q iŻ© i=6Ż¼ 7Ż¼ 8Ż¼ 9Ż¼ 10Ż¼ 12Ż¼ 13Ż¼ 4Ż®Ą─▀xō±ę¬Ė∙ō■(j©┤)Ūķør┤_Č©ĪŻįO│╠ą“īŹļH╦∙ąĶ╣żū„ų▄Ų┌×ķT Ż¼ĘųŅlŲ„ėøØMĢrķg×ķT' ,«ö T' >T ŪꎥĮy(t©»ng)š²│Ż╣żū„ĢrŻ¼│╠ą“├┐Ė¶ T ī”4060Æ▀├Ķę╗┤╬Ż¼ĘųŅlŪęė└¤oėøØM▌ö│÷ą┼╠¢ĪŻ╚ńŽĄĮy(t©»ng)╣żū„▓╗š²│ŻŻ©╚ń│╠ą“┼▄’wĪó╦└裣h(hu©ón)Ą╚Ż®Ż¼│╠ą“ī”4060▓╗░l(f©Ī)│÷Æ▀├Ķą┼╠¢Ż¼ĘųŅlŲ„ėøØM▌ö│÷├}ø_ą┼╠¢╩╣CPUÅ═╬╗ĪŻ
3 ĮYšZ
įOėŗĄ─╣żśI(y©©)ÖCąĄ╩ų┐╔╠µ┤·╚╦╣żū„śI(y©©)Ż¼ĮĄĄ═ū„śI(y©©)’LļUĪŻÖCąĄ╩ųĮYśŗ║═┐žųŲŽĄĮy(t©»ng)╚įėąįSČÓå¢Ņ}ąĶę¬ĮŌøQŻ¼ę╗╩Ū▓╗═¼ĮYśŗ║═Ė„╣”─▄─ŻēKų«ķgĄ─▀BĮėŻ¼ąĶā×(y©Łu)╗»─Ż╩ĮŻ¼╠ßĖ▀┐žųŲŽĄĮy(t©»ng)š¹¾w╦«ŲĮĪŻČ■╩Ū┴”īWĘų╬÷Ą─ÅŖČ╚ĪóäéČ╚║═ūŅ╝čĄ─▒█▓┐ĮYśŗėą┤²æ¬ė├ėŗ╦ŃÖCā×(y©Łu)╗»Ż¼ųĄĄ├▀Mę╗▓Įėæšō║═╔Ņ╚ļ蹊┐ĪŻ
ū„š▀Ż║Åł╚AÅŖŻ¼ 1991─Ļ╔·Ż¼╬„▓┐╣▄Ą└╣½╦ŠĖ╩├C▌öė═ÜŌĘų╣½╦ŠīŹ┴Ģ╔·Ż¼ų„ę¬Å─╩┬ķL▌ö╣▄Ą└ē║┐sÖCŠSą▐ŠSūoŻ¼░▓╚½╣▄└Ē╣żū„ĪŻ
╔ŽŲ¬Ż║
Ž┬Ų¬Ż║
 Ė╩╣½ŠW(w©Żng)░▓éõ 62010202003034╠¢
Ė╩╣½ŠW(w©Żng)░▓éõ 62010202003034╠¢ 
